


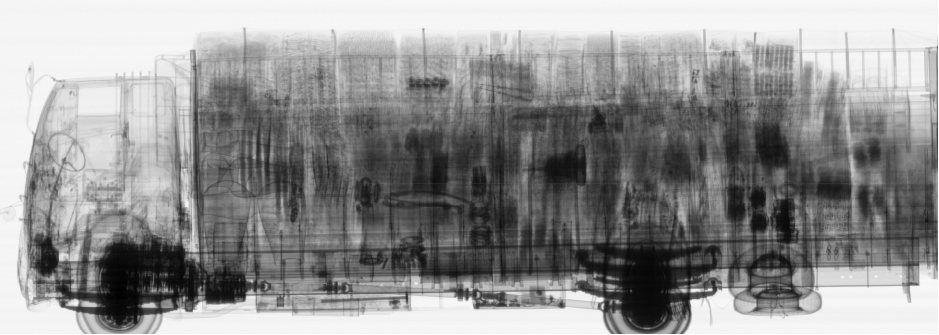
Ferpleatsbaar fracht- en autoynspeksjesysteem
BGV6100 ferpleatse fracht- en auto-ynspeksjesysteem foarsjoen fan in elektroanyske lineêre accelerator (Linac) en in nije PCRT solide detektor, dy't twa-enerzjy-röntgen- en avansearre materiaalidentifikaasjealgoritmen brûkt om it perspektyf scannen en ôfbylding fan lading en auto te berikken, smokkelguod te identifisearjen.It systeem hat twa wurkmodi: drive-through-modus en mobile skennenmodus.Yn mobile skennen modus beweecht it systeem op 'e grûnspoar om de frachtauto's te scannen.De ynset fan it systeem hâldt rekken mei it gemak fan gebrûk op it plak.In operaasje konsole is ynsteld by de yngong fan it reau.It personiel fan 'e front-end gids is ferantwurdlik foar it begjinnen fan it ynspeksjeproses nei't it auto klear is, en kin it heule ynspeksjeproses yn it heule proses observearje.Sadree't der in ôfwiking is fûn, kin it ynspeksjeproses fuortendaliks stoppe wurde.Nei it foltôgjen fan 'e ynterpretaasje fan' e auto-ôfbyldingsôfbylding, kin de efterkant-auto-ôfbyldingsinterpreter kommunisearje mei de front-end-gids fia de konsole en kin it ynterpretaasjeresultaat jaan fia it korrespondearjende warskôgingssinjaal.
- Gruttere trochslach, net minder dan 120 frachtauto's yn 'e oere yn trochstjoermodus, en net minder dan 25 frachtauto's per oere yn' e mobile skennenmodus
- Stralingsfeiligens foar de sjauffeur, hat de funksje fan automatyske útsluting fan frachtweinkabinen en ien kaaiskeakel nei mobile skennenmodus
- IDE technology, stipe materiaal diskriminaasje
- Abundant systeem yntegraasje ynterface
- Hegere stielen penetraasjefermogen
- Avansearre byldynformaasjebehearsysteem.De opslach, opheljen, besjen, eksportearjen en oare funksjes fan auto-ynformaasje, ynklusyf perspektyfôfbyldings, stypje netwurke sintralisearre behearfunksjes.
- Client operaasje ynterface: It ûntwerp fan de client operaasje ynterface fan it apparatuer software systeem is ridlik en brûker-freonlik, de ynterface is dúdlik en bondich, de operaasje is handich, de funksje module konfiguraasje is yntuïtyf, de yndieling is ridlik, en it ûnderhâld is maklik.





